原标题:燕山大学「无系留软体抓手」,1.5kg自重抓起40kg物体,还能陪你打羽毛球!

导读
刚性抓手结构坚固,响应快,但是缺乏适应性。软体抓手柔软,安全,适应性极强,相比于前者,它更适用于我们日常生活中的场景。但是软体抓手也有它的局限性,例如需要被系留于复杂笨重的硬件系统(气泵,气阀等),另外,软体抓手的抓取负载也较小。为了解决这一问题,来自于燕山大学的姚建涛教授研究小组近日开发了一款无系留(untethered)的软体抓手,称之为UHL(Untethered High-Load)软体抓手,将气动系统,控制系统集成到了抓手模块上,总体重量为1.5kg。值得注意的是,基于仿生缠绕原理设计,UHL软体抓手可以抓取超过自己重量26倍的物体(40kg),其抓取重量甚至超过了很多刚性抓手。该研究成果近日发表于国际著名机械类期刊《Mechanism and Machine Theory》上。
气动无系留软体抓手抓取负载40kg
抓手(末端执行器)是机器人和环境发生交互的关键部件,包括抓取和操作各种各样的物品。刚性抓手结构坚固,速度快,抓取力度大,抓取可靠,但是缺乏适应性,常常被用于固定场景的工件的抓取和装配等。软体抓手柔软,安全,适应性极强,但是抓取精度相对较低,抓取力度较小,相比于刚性抓手,更适用于我们日常生活中的一些应用场景,例如服务机器人。近年来,软体抓手受到机器人学家的亲赖,研发可靠又实用的软体手当下已经成为工业界和学术界的热门研究方向。其中,气动的软体手鉴于其低廉的价格,较大的抓取力度而颇受青睐。
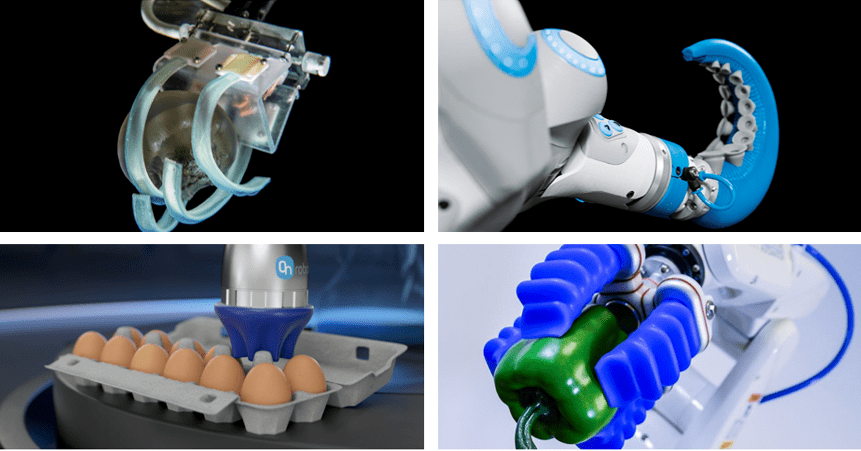
图2 几种典型的软体抓手
虽然气动软体抓手具有优越的适应性和安全性,如图中所展示的抓取柔软的海洋生物,抓取鸡蛋,蔬菜等脆弱而形状各异的物体。但大多数气动软体手都有一个不得不面对的硬伤,就是需要接到一个气泵上,很大程度上限制了气动软体手的实用性,尤其是安装到移动机器人上的时候非常的不方便。
来自于燕山大学的研究者们近日提出了一种新型的软体抓手,命名为UHL(untethered high-load)软体气动抓手。这款UHL抓手通过巧妙的机械设计,将气泵,电池,控制器,传感器等集成到了软体抓手模块上,该软体抓手重量仅为1.5 kg。借助于研究者提出的一种新型的仿生设计的缠绕抓取原理,UHL抓手的载荷也非常的惊人,达到自身重量的26倍(40kg),甚至超过了一些传统的刚性抓手。该研究成果近日发表于国际著名机械类期刊《Mechanism and Machine Theory》上,第一作者李海利、通讯作者姚建涛。
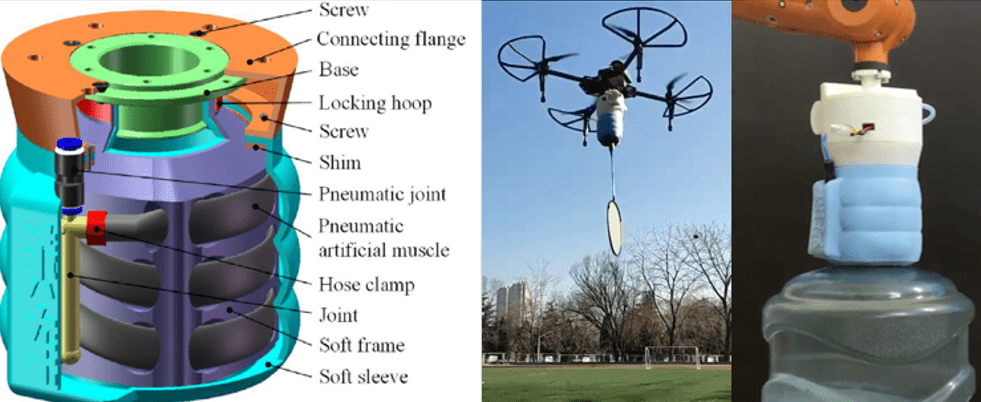
图3. UHL软体抓手
小编先带大家看一些这款UHL抓手的应用展示,在下一部分为大家介绍抓手的机械设计和一些相关测试。(文末附有完整的视频,感兴趣的不要错过喔!)
UHL软体抓手抓取物体并且随意挥动。
图4. 抓取电钻并且切换姿态
UHL软体抓手可以牢牢地抓住羽毛球拍,并且以高速挥动(1.5m/s)而不掉落,简直是一个喜欢打羽毛球的superstar。
图5. 抓取和挥动羽毛球拍
UHL抓手载重抓取展示,抓起18kg的桶装水,小编看到这个展示惊呆了,印象里,软体抓手能抓5kg的物体就不错了!就算是成年人抓起桶装水都颇为费力!别急,这还远远没有达到UHL抓手的极限。
图6. 负载能力展示18kg重的桶装水,已经很猛了!
UHL抓手抓取展示,抓取30kg的哑铃,小编惊呆了,软体抓手还能抓取这么重的东西?稍安勿躁,还有更猛的!
图7. UHL负载能力展示抓取30kg,这还是软体抓手吗?
终极展示!抓取40kg重的哑铃。如此出众的抓取能力已经完全的让小编惊呆。可以说这样的负载能力已经远远超过一些刚性抓手的负载能力。
 图8. 负载能力展示抓取40kg哑铃片,几乎相当于一个体重较轻的人!
图8. 负载能力展示抓取40kg哑铃片,几乎相当于一个体重较轻的人!
软体抓手的原理和测试
UHL抓手是基于燕山大学的研究者早前提出的一种仿生的缠绕原理(常见于蛇类)软体抓手,但是上一代的设计还需要连接到一个气泵,一定程度上限制了软体抓手的便携性和工作空间。在最新的这个研究中,研究者着眼于实现无系留的软体抓手设计,也相应做出了一些改进和创新。

图9. 蛇类的缠绕抓取猎物
UHL软体抓手由两部分组成,抓取系统和控制系统。抓取系统是由塑料薄膜管制成的气动肌肉构成,研究者用塑料薄膜管代替弹性管的原因是为了减小管壁弹性变形造成的气压损失,从而减小对于较大气压的需求。气动肌肉处于一种缠绕安置的状态,外部有一个软体的约束,同时连接到一个3d打印的连接件。通过控制气动肌肉的充气和放气,可以实现软体抓手的抓取和释放。
图10. 软体抓手的结构设计
为了将全部模块都包含于UHL软体抓手内部,研究者特别设计了一套控制系统,包含了一个微型气泵,一个定制的控制器,一个电池,还有两个电磁阀(进气和充气)。气泵的尺寸为120x60x60mm,重约260g,气泵的流量约为13L每分钟。气泵可以提供的正压力约为0.08Mpa,负压力约为-0.05Mpa。控制系统位于软体抓手的上部,集成以后,整个UHL抓手的重量仅仅为1.5kg。UHL由一块800mh,11V的锂电池供电,一次充电可以让UHL抓手至少开合300次。当能源耗尽以后,可以很方便的充电。

图11. 软体抓手的控制系统结构
在自然状态下,气动肌肉处于被折叠的状态,在充气后,它会沿着轴线收缩,同时径向膨胀。由于气动肌肉固定在柔性壳上,在收缩的时候,带动挤压柔性外壳从而将抓手中的物体包裹起来。研究表明,借助于缠绕抓取的设计,仅仅在0.08Mpa的气压下,抓手就已经可以实现大载荷的抓取了(详细的分析请参照论文原文)。

图12. 软体抓手的抓取原理展示
图13. UHL抓手的理论模型
研究者设计了一系列的测试来检测UHL抓手的性能。包括可抓取物品的尺寸测试,以及抓取的载荷。UHL抓手完全闭合和开启分别需要5秒钟的时间,所以一个抓取周期约为10s。最小的可抓取物品直径为22mm,最大为90mm。
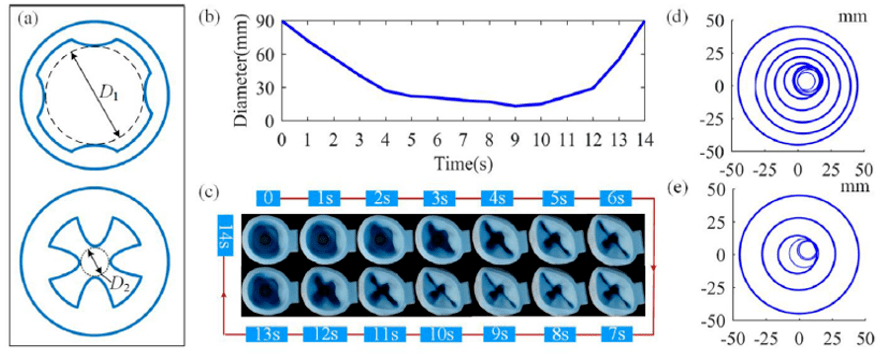
图14. 软体抓手的开合变形
研究者也测试了UHL抓手不同方向的抓取力,包括垂直方向和水平方向。将一个测试物体连接到一个测力计上,通过拉脱实验来测试最大的拉脱力是多少。
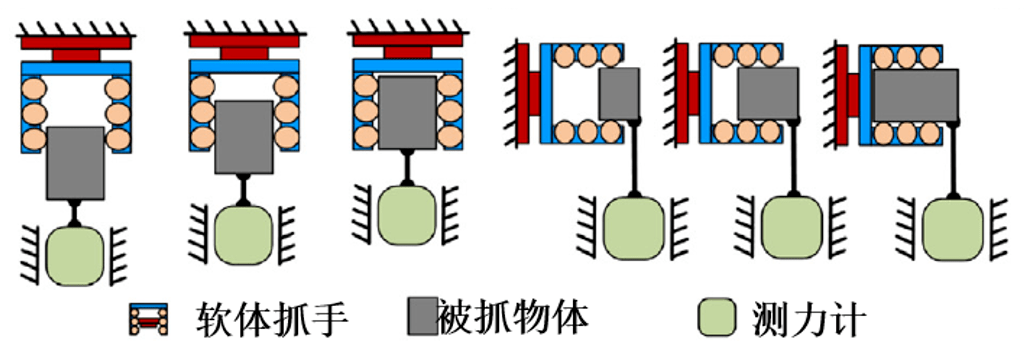
图15. 软体抓手的抓取力测试
通过试验测试得知,尽管气动系统只能提供0.08Mpa 的气压,抓取负载最高可达抓手自重的26倍。如此出众的抓取能力让UHL抓手在很多场景中都能大显身手。
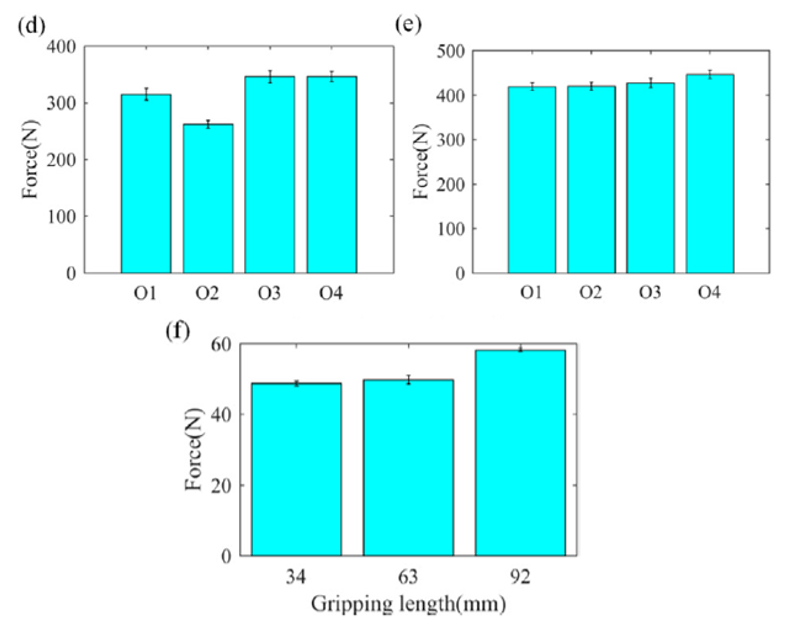
图16. 软体抓手的抓取力结果
为了进一步展示UHL软体抓手的实用性,研究者用UHL软体抓手抓取了不同形状,材料以及硬度的物品。包括重达18kg的矿泉水桶,40kg的哑铃,还有一些生活中常见的电钻,以及羽毛球拍。鉴于其优秀而稳固的抓握能力,UHL软体抓手甚至可以抓取并且以1.5m/s的速度挥动羽毛球拍。

图17. 不同的物品抓取测试
另一个让人眼前一亮的应用场景便是将UHL抓手安装于无人机的底部,抓取了羽毛球拍和网球。由于它具有较高负重比(26:1),可以让装有UHL抓手的无人机的抓取能力得到很大的提升。

图18. 软体抓手安装在无人机上进行测试
总结与展望
整体来说,UHL抓手展示了惊人的负载能力,以1.5kg的自重抓起了40kg的物品,哪怕是刚性抓手都望尘莫及。但是,现在UHL还有一些限制,例如受到微型泵的流量限制,抓手的开合速度比较低。研究者指出,开发一些关键零部件可以很大的提升UHL抓手的效率。
软体抓手柔软,适应性强,能抓取各种各样的物体,因此,实现软体抓手的无束缚设计是非常有价值的。在未来,研究者指出他们计划进一步缩小UHL抓手的体积,同时利用预充气体的原理来实现高速抓取。小编希望在不久的将来能够看到一款更加迷你和快速响应的UHL抓手。同时也希望能够启发相关的研究者,研发新型的实用的软体抓手。