原标题:IMX766 和 IMX689 手机摄像画质哪个更好?
去年年末,OPPO 发布了 Reno5 Pro+ 并在这款手机上首发了一块全新的 CMOS:IMX766。这很容易就让人联想到 OPPO 在 Find X2 Pro上定制的那块 IMX689。那么,同样是定制,这块新 CMOS 属于什么样的水平?接下来我们就通过实拍样张来告诉你。

零、先看下两位选手的身高体重三围(误)
当然,虽说是结合实拍,但是硬件规格还是要介绍一下的。
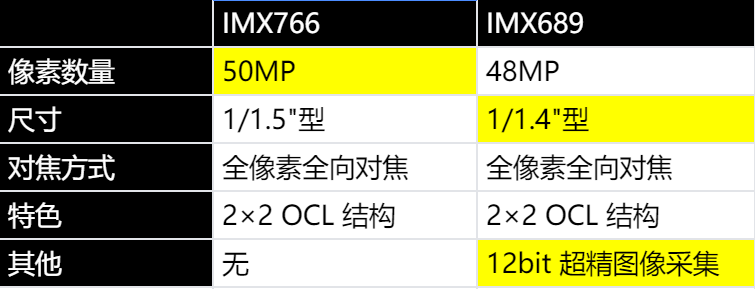
从硬件参数上来看,IMX689 显然更加激进:不仅仅拥有 1/1.4″ 的大尺寸、支持 12bit 超精图像采集,而且在 12MP 模式下还能直接输出 12bit 的 RAW 文件,可以说是目前市售 RGGB 传感器中理论输出规格最强的了(没错比 IMX555/557 都要强)。
(单传感器单帧 12bit RAW 输出,目前安卓机最强规格)
而 IMX766 相对于老大哥 IMX689,传感器尺寸从 1/1.4” 型缩小为 1/1.5“ 型,有利于缩小模组体积;总像素数量从 48MP 升级到 50MP,理论上细节表现会略好一点。而 2×2 OCL 则保证了 IMX766 的对焦性能不会缩水。
好了,既然每个选手的技术参数各位都了解的差不多了,那么就让我们开始吧:
第一轮:日光条件
在第一轮中,我们先测试在日光条件下两款 CMOS 的表现。我们将重点关注两款 CMOS 在色彩表现、动态范围特别是锐度上的表现。需要注意的是,在日光条件下,开启 AI 场景增强与否,对两者 CMOS 的画质影响不大,所以在本轮我们不会特意区分是否开启 AI 场景增强的样张。
先看第一观感:IMX689 的色彩要比 IMX766 的更加鲜艳,同时部分颜色的色相会有不同,例如下图中的美团单车,IMX689 的黄色部分更加偏品一点,而 IMX766 的颜色则要稍微寡淡一点。
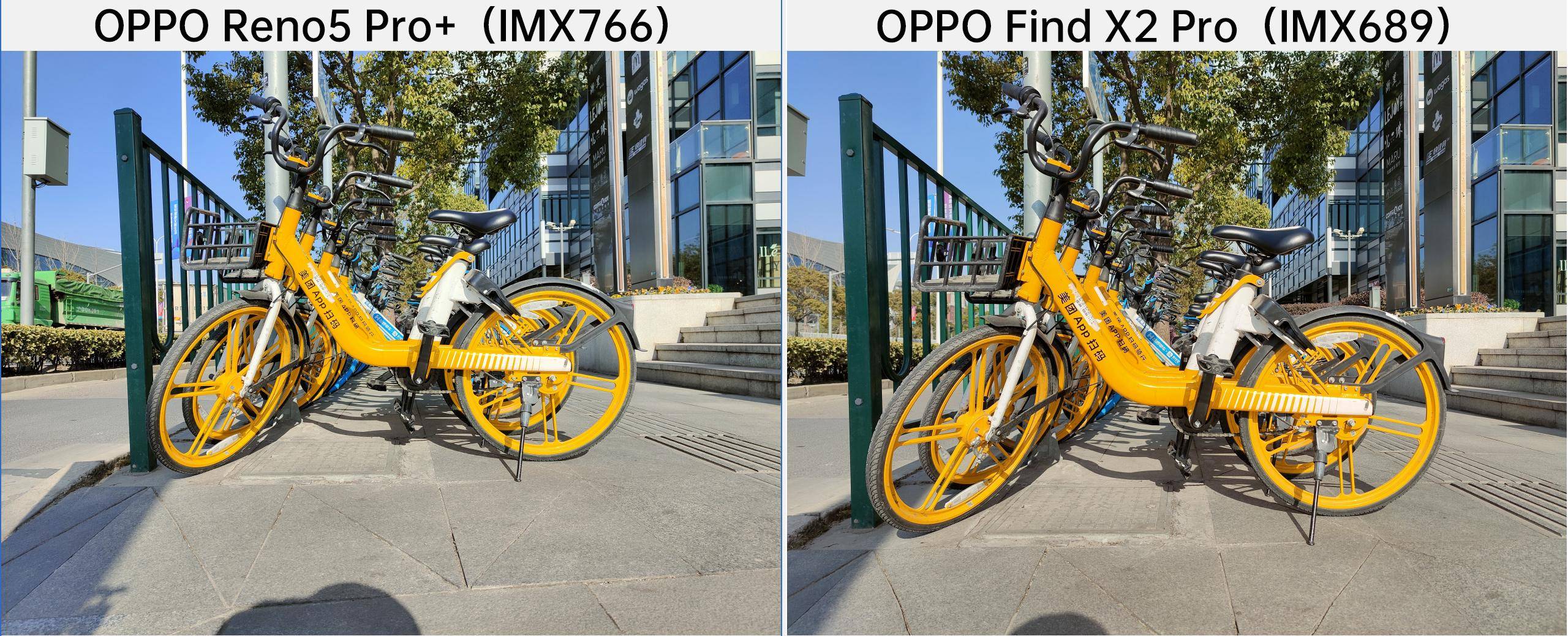
(色彩对比,注意共享单车的颜色)
再比如下图中,IMX766 拍出来的树叶会更加翠绿一些,而 IMX689 的路面则有些偏品。当然每个人在不同场景下对于色彩表现的喜好都各不相同,所以在本文中我们只讲述色彩差异,而不会下谁好谁坏的判断。
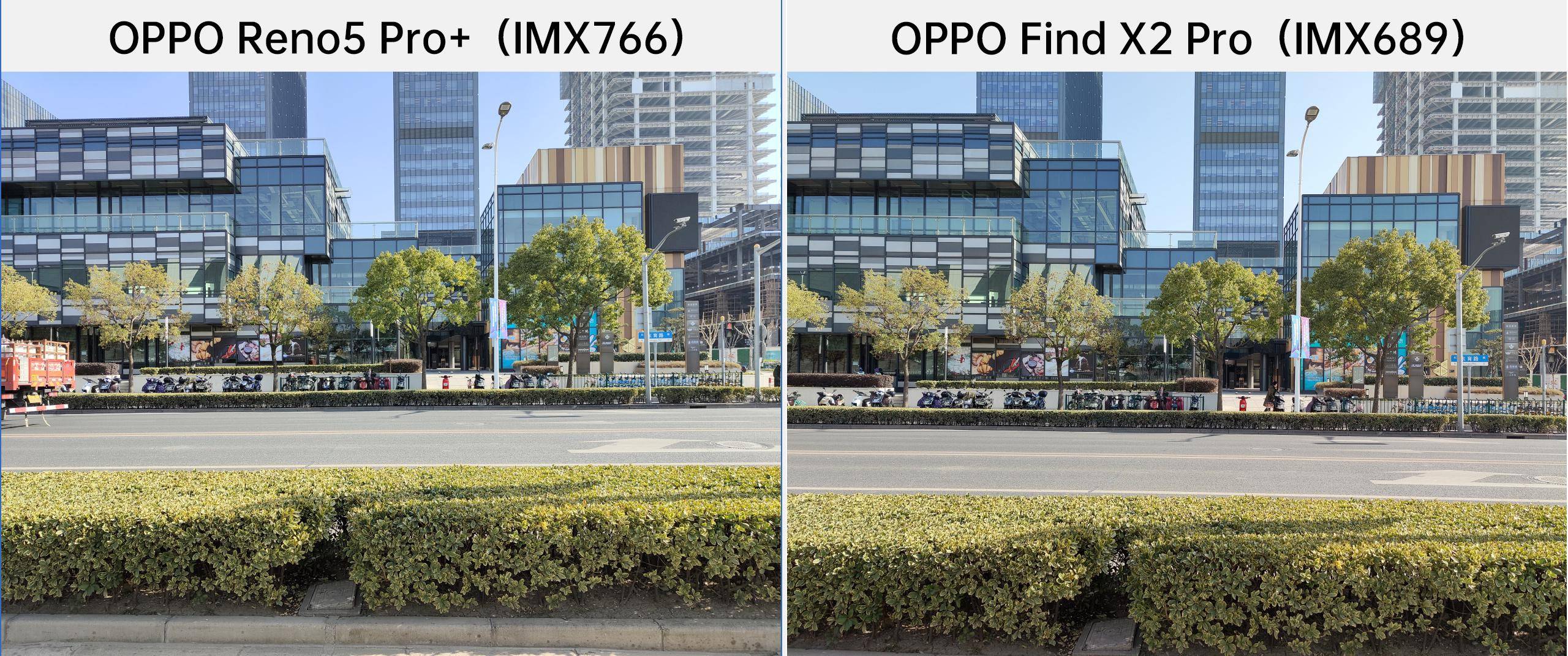
(色彩对比,注意柏油路面和树叶的颜色)
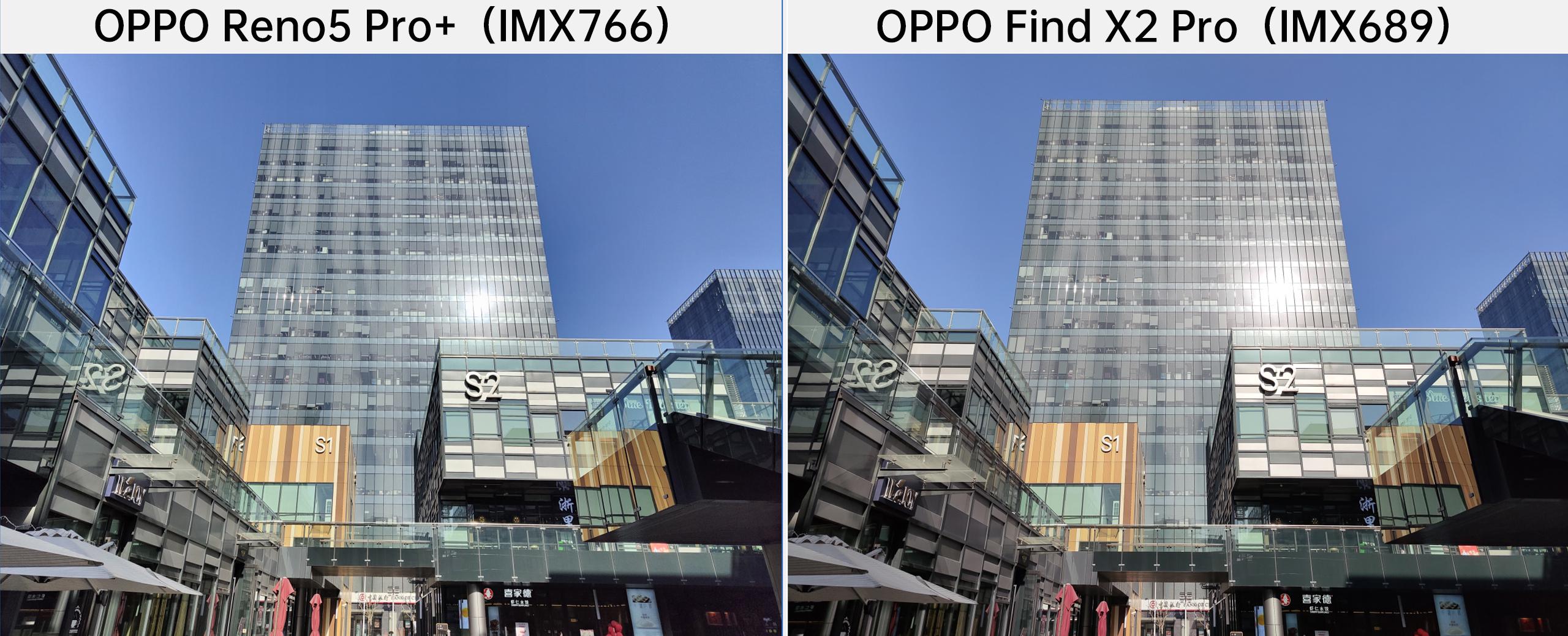
接下来看动态范围。在光线良好的情况下,OPPO Find X2 Pro 和 OPPO Reno5 Pro+ 动态范围很接近。硬要说区别的话,在多数情况下,OPPO Find X2 Pro 的高光细节保留要更多一些。

(动态范围对比,注意大楼的高光部分)
在锐度方面,当两块 CMOS 处于默认模式(四合一)下,成片从小图上看锐度表现都很优秀。但当我们把原图放大到近似倍率时,反而会发现像素更低的 IMX689 锐度要稍微高那么一点点。

(默认模式中央细节对比)
当两块 CMOS 处于全像素输出模式下,上段所述的差距会更加明显:只有 48MP 的 IMX689 锐度反而要比 50MP 的 IMX766 更加优秀、细节更加清晰扎实。
(高像素模式中央细节对比)
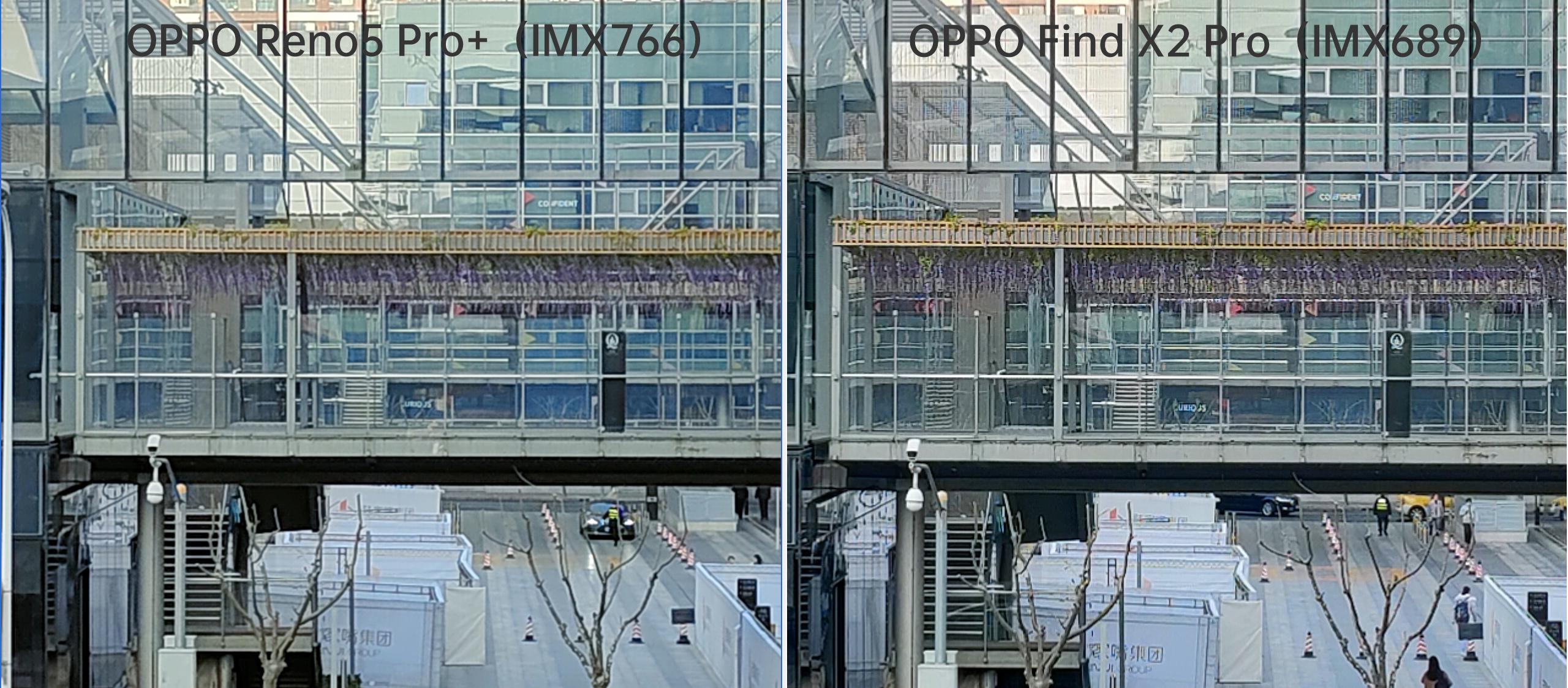
虽然 IMX689 用更低的像素获得了比 IMX766 更好的细节,但是我们还是认为相对于 OPPO Find X2 Pro 的镜组而言,IMX689 的像素数量还是偏低。例如当被摄物体有规则排布的高频细节时,IMX689 就会因为像素数量不够产生混叠(摩尔纹)。

(混叠对比,注意玻璃幕墙上的彩色条纹)
所以在光线比较好的情况下,我们认为 IMX689 的综合画质会更好一些,主要强在锐度和亮部动态范围上。
最后多提一嘴,在面对强点光源的时候,OPPO Reno5 Pro+ 的炫光控制要比 OPPO Find X2 Pro 要更好一些,但这主要还是镜组的原因,而不是 CMOS 的原因。

(炫光对比)
第二轮、弱光(自动模式)
在第二轮里,我们主要讨论在弱光情况下,IMX766 和 IMX689 在使用基础 HDR 算法下的画质表现。同时为了保证两位选手不会偷偷开夜景模式作弊,所以在第二轮中我们将手动关闭手机的 AI 场景增强功能进行测试。
从第一观感上就能发现 IMX766 和 IMX689 在弱光场景下有巨大的色彩还原差异,IMX689 倾向于强化场景中的色彩,海关大楼的颜色会比现实的肉眼观感更加鲜艳。而 IMX766 则恰恰相反,白平衡修正更加激进。
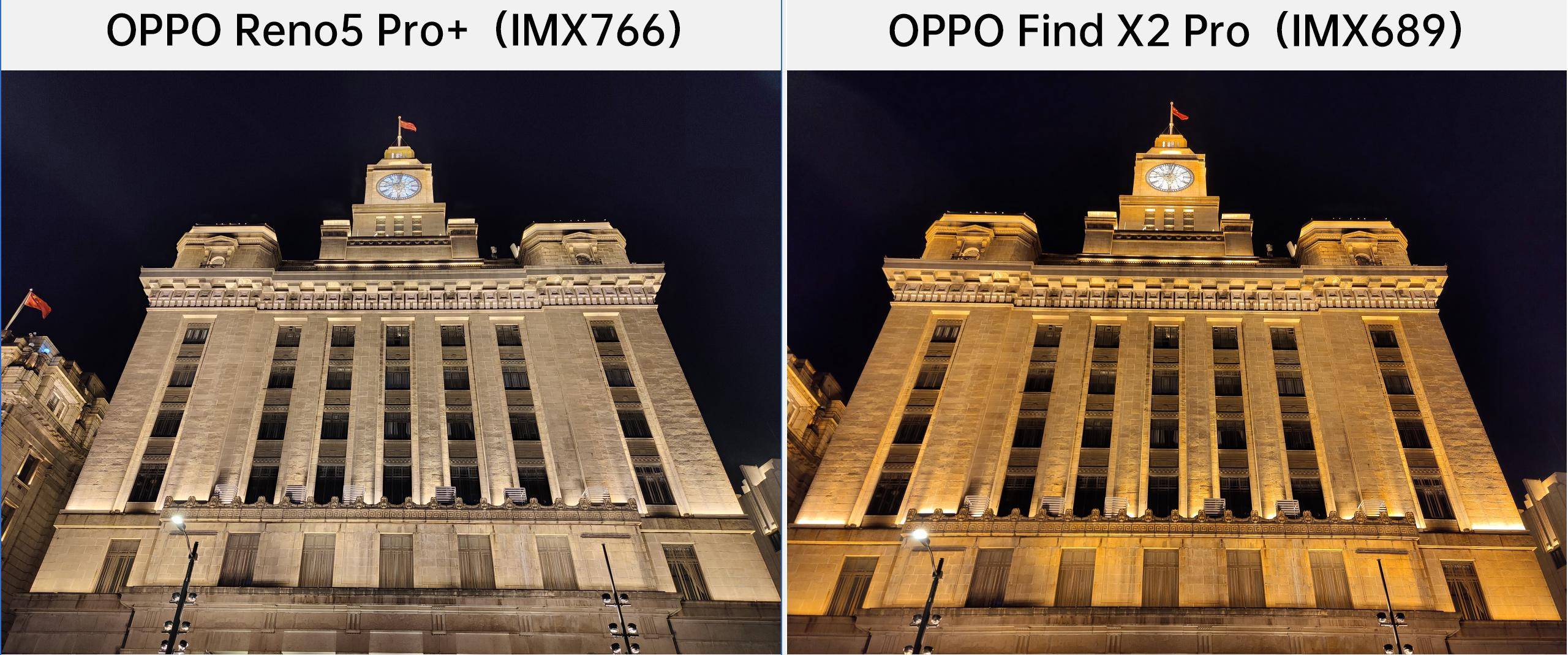
和第一轮的我们看到的动态范围倾向一样,IMX689 更倾向于保留高光细节,在高光动态范围上要比 IMX766 更好。

(高光动态范围,注意高光点大小)
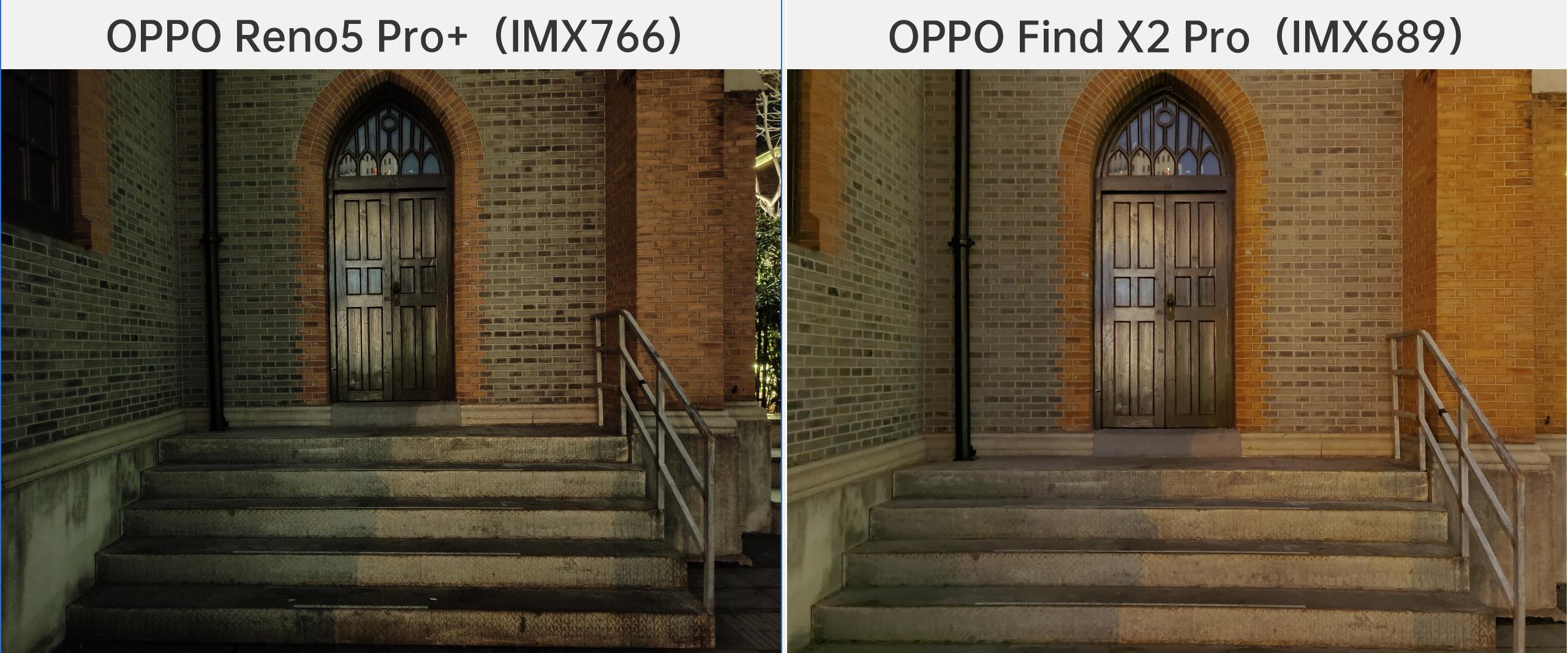
而 IMX766 则会倾向于保留暗部细节,这一点在光比较大的夜景场景下更为明显。

(暗部动态范围,注意近处的灌木)
在锐度上,IMX766 和 IMX689 在弱光情况下的细节表现近似,基本很难区分。

在不开启 AI 场景增强的情况下 IMX766 和 IMX689 的主要区别还是在颜色还原上,其中 IMX766 的白平衡矫正更加激进,而 IMX689 的色彩更加鲜艳。
第三轮、夜景模式
在第三轮中,我们将强制打开两位参赛选手的超级夜景模式,来评价当超级夜景算法介入时两块 CMOS 的画质表现。依据惯例,在夜景情况下我们将重点关注动态范围以及是否有失色情况。
我们发现,在打开超级夜景后,IMX689 的暗部动态范围有所提升。比如下图中的路牌,可以看到 IMX689 的暗部动态比 IMX766 更好。同时亮部也没有过曝。

而在色彩上 IMX766 和 IMX689 的色彩差异没有先前第二轮那么明显。IMX689 色彩还原的艳丽倾向,倒也正好能够避免在高动态范围下画面反差不够的问题,而 IMX766 的色彩表现还是比较寡淡。

由于夜景模式算法补齐了 IMX689 暗部动态范围稍弱的短板,所以我们认为 IMX689 在夜景模式下的画质综合表现要优于 IMX766。
第四轮、脚架模式
本次参与的两款手机都支持将 CMOS 性能榨干的脚架模式,自然我们也测试了两款手机的脚架模式,来看看这两块 CMOS 在弱光下的画质究竟能走多远。
在开启脚架模式后,两块 CMOS 的动态范围相比一般的夜景模式有了进一步的提升。但是两块 CMOS 的区别依旧存在:IMX689 动态范围更高,且色彩更艳丽;而 IMX766 色彩比较平淡,且动态范围较 IMX689 更低。

不过得益于脚架模式带来的超高信噪比,在细节上 IMX766 多出来的 0.5MP 终于派上了用场:将画面中央进行相同比例放大以后,可以看到 IMX766 的细节要比 IMX689 更加扎实。

相对于第三轮夜景模式基本一边倒的评价,第四轮脚架模式的两块 CMOS 表现的区别其实更贴近于 IMX766 和 IMX689 在硬件参数上的区别:IMX689 底更大,所以带来了更强的动态范围;而 IMX766 像素更多所以细节上略有优势。
总的来看,如果不考虑配套镜头的影响,那么目前而言,IMX689 的综合画质还是要略优于 IMX766 的,主要优势在于颜色和夜景模式下的动态范围上。而 IMX766 更高的像素数量在某些场景下的确能带来更佳的锐度,只是这样的场景并不多罢了。
不过反过来看,IMX766 在增加了像素数量、节约了模组体积的情况下,把画质做到了接近 IMX689 的水准。所以无论是从节约手机内部空间还是增强消费者感知的角度上来看,IMX766 在未来都是一个性价比更高的选择。
彩蛋、极夜模式
在夜景模式下,当手机检测到场景光极弱时,两款手机都会自动启用极夜模式。在该模式下,手机会大幅度提升成片亮度,达到近似于”夜视仪“的效果。
如果各位觉得极夜模式也不过如此的话给大家看一下现场大概是什么样子的。
(实拍图)