作为高频使用的地图类产品,从最开始的导航到路线规划,到现在的展示各种信息,以及添加各种内容功能上,似乎大家都还没有找到下一步更新的方向。从地图类产品的用途出发,我们需要关注的是什么?路线,导航,信息,还有其他的么?这篇文章,作者告诉我们,「解决拥堵」和「看见更真实的路况」永远是很好的进化方向。

众所周知,地图是现实世界的抽象化表达,核心功能在于回答人们“我在哪”、“怎样到达”、“如何更快到达”三个问题。但由于受屏幕承载信息限制,我们在地图上看到的点、线、面、体地理要素必然受到了不同程度折损——正如历史学家理查德·W.昂格所言:地图总是把复杂的世界变得不复杂。地图对物质世界的陈述通常是失实的,因为重现陆地的实际情况是不可能的。
对真实世界陈述的“失实”,让地图产品经理不得不用人为方式翻译信息,以便回答用户的三个问题。例如将道路通行能力划分为不同等级,再用相应颜色来对号入座,红色标色拥堵、绿色表示畅行等,这时用户便可根据颜色进行出行决策。
问题在于:现实世界的路况,真是几种颜色就能说清的吗?
道路发生拥堵背后有无数种可能,而每一种可能所带来的拥堵时长又往往不尽相同。是等待10分钟恢复畅行,还是绕20分钟远路求稳?
靠颜色回答不了用户的疑问。
一、滴滴导航的「千里眼」
滴滴导航在近日推出“千里眼”导航功能,用户可以查看前方拥堵路段的真实画面。凭此功能,滴滴导航成为市面上第一款也是唯一一款,可以帮助用户看到实时路况图像的地图应用。
具体操作上,用户在路径规划页输入起终点后,便有机会查看行程路线上拥堵路段的实景图像,图像内容包括且不限于交通管制、交通事故、事故所涉车道等详细信息(如下图)。

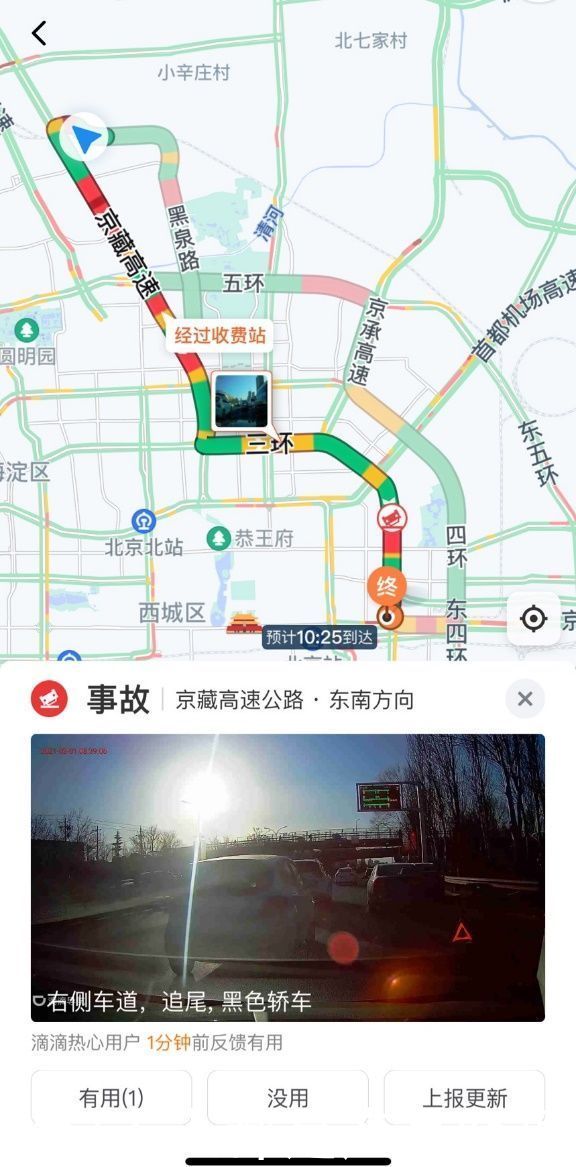
导航行进中,如果前方发生交通事故(如下图),滴滴导航会优先语音播报事故发生的车道以及事故的严重程度,给出变道、避让建议。在确保行车安全的前提下,用户还可以提前点击查看前方事故路段的实景图片或视频。
“千里眼”功能的出现,是导航功能步入成熟后的一次大胆尝试,也对行业未来发展有一定启发意义。
过去十余年里,为掌握真实的前方道路情况,业内进行过一系列摸索:从早年间主要依靠地磁线圈获取车速、到城市大量安装使用监控探头,再到图商们广泛使用采集车.而随着移动互联网的迅猛发展,众包式采集也开始占据主流,基于海量GPS数据进行大规模的快速计算以及鼓励车主随时在端内上报变得愈发重要。
但是,如果导航软件缺乏交警路网数据等第三方数据校验,或者对异常数据难以剔除,很容易闹乌龙。其中最具代表的便是前几年的虚拟交通拥堵事件——一位行为艺术家导航推着装满开启导航应用的手机的购物车,不慌不忙地走在街上,结果被系统误认为是该路段拥堵严重,实际却是这条路几乎空无一人。
二、“看得见”有助于缓解信息缺失焦虑
归根结底,地图是一种帮助用户理解复杂情况的信息展示工具。而民用地图的复杂又可大致分为两种:一种是静态信息的复杂,例如街道建筑;另一种则是动态信息的复杂,典型场景是城市交通。
相较于静态信息,路况信息变化极快且难以捕捉;早年间有某些地区的交通频道等电台广播会将真实路况信息播报给司机,但这些消息存在滞后性,等到了实际地点往往事与愿违。
针对静态信息的处理,目前市面上主流地图应用在完善POI的同时,也在积极开展AR方面的尝试,以此为用户还原1:1的真实世界。
关于大家为何同时将颗粒度更细、保真度更高作为地图应用的未来发展方向,一个比较科学的解释是:人脑对于图像的处理与理解都更加迅速。
2014年,麻省理工学院发布报告称人们大脑处理一张图像信息仅需13毫秒。据统计,过去一百年里,报纸中可视化信息的使用量增加了142%,标志着图像在信息传递过程中开始占据主导地位。
但目前对道路交通等动态信息的真实画面捕捉上,业界还一筹莫展。
因为以当前的技术条件,无论是采集设备、网速、算力,都没法支持全量道路数据的实时拍摄、传输、和处理。在此背景下,代替图像传达信息的其它翻译手段都更像是权宜之计,无法真正缓解人们对于路况信息缺失的焦虑。
那回到滴滴导航这里,“千里眼”功能是如何做到对路面真实场景捕捉的呢?
据了解,在设备端,滴滴导航在桔视行车记录仪上搭载一套低功耗算法,算法能只定向对地面上的标识进行识别。比如事故后,车主在路上摆放的三角牌、交通管制的锥桶等,并不涉及个人信息。
而在云端,滴滴导航搭载了一套更复杂的视觉感知模型,能对设备端的识别结果进行校验,以保证识别准确率。同时,自动基于桔视识别的结果,对事故进行车道级定位并自动对车牌、人脸等敏感信息进行脱敏,最大程度保护隐私,并快速将实景视频或画面更新至 App 内,有效缓解堵车焦虑。

目前,桔视已经覆盖网约车50%的订单。结合大量的用户上报数据和轨迹分析数据,滴滴导航每天可以对外展示数十万张实景照片和视频。同时,系统也会基于这些更丰富的道路信息,为车主推荐更合适的路线。
这种为用户建立直接观感的做法,能够给驾驶员提供了更明确的等待预期、临场感,以及安全出行建议。大幅降低以往“预估消散时间”带来的不确定性,
三、滴滴导航的边缘创新
与传统测绘图商所关注的数据维度不同,滴滴导航更多从自身所处场景下的差异化需求出发,打造符合未来发展趋势的导航功能。
“千里眼”的出现,正是滴滴导航团队讲目光聚焦于出行场景而非通用场景下的成果(如下图)。

(网约车场景下的产品逻辑拓扑图)
看懂了千里眼背后的诞生逻辑,就不难理解滴滴导航团队在过去几年的发力方向:
比如滴滴导航是国内第一家把机器学习成功应用到ETA(预估到达时间)的公司。从2018年开始,滴滴导航创新性将深度学习技术引入ETA,能充分结合乘客与司机的地理位置信息、路况信息、出行数据、司机行驶习惯、路网状态等,进一步提升了预测准确性;
再比如路径规划上,经过网约车高度复杂场景的打磨,以及大数据的积累,滴滴导航将自驾场景下的用户体验大幅度提升,采用全新的架构方案来设计路线规划相关算法,在确保安全的基础上,将“快”做到极致,在行程中实时预测找到更符合驾驶员期待的路线,同时综合考虑乘客是否方便到达、车辆是否方便通行、车主停车是否安全、停车是否易违章等因素,为车主推荐更好的落车点,有效帮助避免违章。
可以想见的是:未来随着5G覆盖率的逐步提升,滴滴导航将凭借海量真实高质量的交通出行数据,在实时性、精准性、连续性和真实性等方面更上一层楼,帮助更多人“看到真实世界”的同时,给未来导航产品的发展指明一条方向。
本文由 @Fiona 原创发布于人人都是产品经理,未经许可,禁止转载
题图来自 Unsplash,基于 CC0 协议